UNIDAD IV SISTEMAS DE ECUACIONES LINEALES Y MATRICES.
Cualquier sistema de ecuaciones lineales puede escribirse siempre en forma matricial de la siguiente forma:

donde A es la matriz de los coeficientes, X la matriz de las incógnitas y B la matriz de los términos independientes.
Así, por ejemplo, el sistema de ecuaciones lineales:

DEFINICIÓN:
Una MATRIZ es un conjunto de numeros reales dispuestos en forma de rect ´ angulo, ´
que usualmente se delimitan por medio de parentesis. Si una matriz tiene ´ n filas y m columnas, se dice que es una matriz de orden n×m. Notese que una tal matriz tiene ´ n ·m elementos.
El elemento (o componente) (i, j) de una matriz A es el numero ´ ai j que se situa en la fila ´ i y la columna j.
SISTEMA DE ECUACIONES LINEALES: CONSISTENTE,
INCONSISTENTE, Y SU REPRECENTACION
PARAMETRICA DE CONJUNTO SOLUCION.
Clasificación de los sistemas de ecuaciones lineales y tipos de soluciones











Se despeja x en la segunda ecuación:



Despejamos x en la primera ecuación:


:Se sustituye este valor en la primera o segunda ecuación:

Despejamos, por ejemplo, la incógnita x de la primera y segunda ecuación:

Igualamos ambas expresiones:

Luego, resolvemos la ecuación:

Sustituimos el valor de y, en una de las dos expresiones en las que tenemos despejada la x:

Una ecuación lineal es una ecuación algebraica que contiene variables cuyo máximo grado posible es uno. Tales ecuaciones se utilizan normalmente para definir líneas rectas. Cuando tenemos numerosas ecuaciones lineales, donde sus posibles soluciones nos dan un punto de solución, las llamamos como conjunto, sistema de ecuaciones lineales. Generalmente, un sistema de ecuaciones lineales se convierte en forma de matriz por conveniencia para su solución. Sea un sistema de ecuaciones lineales dado como, x + y – z = 1 3x – 2y + z = 3 4x + y – 2z = 9
A continuación se indica la forma matricial del sistema de la ecuación como,
Existen tres tipos de sistemas de ecuaciones lineales posibles, los cuales dependen del punto de intersección de la ecuación lineal en un determinado sistema de ecuación. Estos son:
1. Inconsistente independiente: Si las ecuaciones del sistema dado vienen a ser las mismas rectas que difieren en su pendiente, entonces tal sistema de ecuaciones lineales es llamado consistente y dependiente. Este sistema de ecuaciones lineales no proporciona una solución dado que todas las rectas son paralelas entre sí y no pueden cumplir con los demás, incluso si se extiende hasta el infinito, por lo que nunca se obtiene un punto de intersección, y por tanto, no puede obtenerse ninguna solución.
2. Consistente dependiente: Si todas las ecuaciones en un sistema de ecuaciones lineales calculan la misma recta en un pedazo de papel milimetrado, de manera que todas las rectas se superpongan unas sobre otras, podemos llamar a tal sistema de ecuaciones como un sistema de ecuaciones lineales inconsistente e independiente. En este caso obtenemos un número infinito de soluciones porque todos los puntos por encima de la recta son puntos de intersección.
3. Consistente independiente: Este es el sistema más general de las ecuaciones lineales, donde tenemos un número de rectas que se interceptan en un solo punto, el cual es la única solución para el sistema de ecuaciones, y denominamos a tal sistema de ecuaciones consistente e independiente.
Además de esto también tenemos tres categorías de posibles soluciones para un determinado sistema de ecuaciones lineales. Estas son:
1. Solución Independiente: La solución independiente es la solución única para un sistema de ecuaciones lineales. Para un sistema de ecuación, si aplicamos una operación de transformación de fila generalmente obtendremos una matriz de identidad. Una característica única de este tipo solución es que se necesita disponer de tantos números de ecuaciones como variables en el sistema dado. Si este requisito no se cumple, no podemos obtener una solución independiente.
Al resolver el sistema de ecuaciones obtenemos una solución única para cada una de las tres variables como x = 3, y = 1 y z = 2
2. Solución Dependiente: La solución dependiente es aquella por medio de la cual se obtienen numerosas soluciones para una sola variable, este es el caso de las soluciones múltiples. Para este sistema de ecuaciones, si aplicamos la operación de transformación de fila generalmente obtendremos pocos términos de cero. Usualmente, es el caso donde el número de variables es mayor que el número de ecuaciones en el sistema. Muchas veces este sistema contiene una fila cero.
La solución del sistema es x = 4 - 3t, y = 3 + 2t, z = t.
3. Solución Inconsistente: La solución es inconsistente, cuando no obtenemos ninguna solución para el sistema de ecuaciones lineales.
No tenemos una solución para el sistema de ecuaciones anterior.
METODOS PARA LA RESOLUCION DE SISTEMAS DE ECUACIONES, LINEALES: METODO GRAFICO, IGUALACION, SUSTITUCION, ELIMINACION ( SUMAS Y RESTAS)
Llamamos sistema de ecuaciones a un conjunto cualquiera de ecuaciones. Por ejemplo, las ecuaciones:
forman un sistema de dos ecuaciones con dos incógnitas.
El conjunto de ecuaciones:
forman un sistema de tres ecuaciones con tres incógnitas.
Se llama grado del sistema de ecuaciones al mayor exponente al que se encuentre elevada alguna incógnita del sistema.
Por ejemplo,
es un sistema de dos ecuaciones con dos incógnitas de segundo grado, porque el mayor exponente es 2 (la x e y al cuadrado). Este sistema con ecuaciones de segundo grado se llaman también sistema de ecuaciones cuadráticas.
El sistema de ecuaciones es de primer grado con dos incógnitas (porque todos los valores están elevados a 1, que no se escribe).
es de primer grado con dos incógnitas (porque todos los valores están elevados a 1, que no se escribe).
El sistema de ecuaciones
Cuando el sistema de ecuaciones es de primer grado y además no aparecen términos con las incógnitas multiplicadas entre sí(tipo x • y) se dice que es un sistema de ecuaciones lineales.
Resolviendo sistemas
Para resolver un sistema de ecuaciones existen los siguientes métodos:
Método de sustitución
Lo que debemos hacer:
1.- Despejar una de las incógnitas en una de las ecuaciones.
2.- Sustituir la expresión obtenida en la otra ecuación.
3.- Resolver la ecuación resultante.
4.- Calcular la otra incógnita en la ecuación despejada.
Ejemplo:
Resolver
Se despeja x en la segunda ecuación:
x = 8 – 2y
Se sustituyen en la primera ecuación:
3(8 – 2y) – 4y = – 6
Operando:
24 − 6y − 4y = − 6
24 – 10y = – 6
− 10y = − 6 − 24
− 10y = − 30
Se resuelve:
y = 3
Se sustituye este valor en la segunda:
x + 2(3) = 8
x + 6 = 8
x = 8 – 6 = 2
Solución del sistema:
x = 2, y = 3
Método de reducción
Lo que debemos hacer:
1.- Se igualan los coeficientes de una incógnita, salvo el signo, eligiendo un múltiplo común de ambos.
2.- Puede ser el producto de los coeficientes de esa incógnita.
3.- Se suman o restan, según convenga, las ecuaciones.
4.- Se resuelve la ecuación de primer grado resultante.
5.- Se calcula la otra incógnita sustituyendo el valor obtenido en una de las ecuaciones del sistema.
Ejemplo:
Resolver
Primero se deben igualar el 6 y el 8 de la incógnita x. Para hacerlo, amplificamos la primera ecuación por 4 y amplificamos la segunda ecuación por –3. Esto porque al multiplicar 6x por 4 queda 24x; y al multiplicar 8x por –3 queda –24x, y se anulan entre sí; o sea, hemos eliminado una incógnita para trabajar solo con la otra (la y). Luego hacemos lo mismo con la y.
Se elimina la x:  |
Se elimina la y:
 |
Ver: PSU: Matemática; Pregunta 26_2010
Método de igualación
Lo que debemos hacer:
1.- Se despeja una de las incógnitas en ambas ecuaciones.
2.- Se igualan las expresiones, con lo que obtenemos una ecuación con una incógnita.
3.- Se resuelve la ecuación resultante.
4.- El valor obtenido se sustituye en cualquiera de las dos expresiones en las que aparecía despejada la otra incógnita.
5.- Los dos valores obtenidos constituyen la solución del sistema.
Ejemplo:
Resolver
Despejamos x en la primera ecuación:
Despejamos x en la segunda ecuación:
x = –1 – 2y
Igualamos ambas expresiones:
:Se sustituye este valor en la primera o segunda ecuación:
x = 3 + 2(−1)
x = 3 − 2
x = 1
Solución del sistema:
x = 1, y = –1
Otro ejemplo:
Resolver, por el método de igualación, el sistema
Despejamos, por ejemplo, la incógnita x de la primera y segunda ecuación:
Igualamos ambas expresiones:
Luego, resolvemos la ecuación:
Sustituimos el valor de y, en una de las dos expresiones en las que tenemos despejada la x:
SISTEMA DE ECUACIONES EQUIVALENTES.
Los sistemas de ecuaciones equivalentes son aquellos que tienen las mismas soluciones o raíces, aunque posean distintos números de ecuaciones. Una de las reglas de equivalencia en los sistemas de ecuaciones es que si a ambos miembros de una ecuación les sumamos o restamos una misma cantidad (no una incógnita), dará como resultado un sistema equivalente (de esta se pasa de un miembro a otro miembro sumando lo que resta o restando lo que se suma). También si procedemos a multiplicar o dividir a los dos miembros pertenecientes a la ecuación de un sistema por un número que sea distinto de cero, el sistema que resultará será equivalente (así lo que se multiplica a un miembro pasa a dividir al otro miembro y viceversa). A continuación observaremos algunos ejemplos:

Una ecuación es equivalente, si a los dos miembros se les suma o resta un mismo valor:
x + 3 = −2
x + 3 − 3 = −2 − 3
x = −5
También es equivalente una ecuación si se dividen o multiplican ambos miembros por una misma cantidad:
5x + 10 = 15
(5x + 10) : 5 = 15 : 5
x + 2 = 3
x + 2 −2= 3 −2
x = 1
ELIMINACION DE GAUSS Y GAUSS JORDAN.
El método de eliminación Gauss-Jordan es un tipo especial
de procedimiento de eliminación.
Comienza con el sistema original de ecuaciones m × n y lo
transforma, mediante operaciones de renglón, en un
sistema equivalente (es decir, aquel que tiene el mismo
conjunto solución que el sistema original) en el cual la
solución puede leerse directamente.
A continuación presentamos que sucede para un sistema
2 × 2 con una única solución:
a11x1 + a12x2 = b1
a21x1 + a22x2 = b2
Sistema original
↓
1x1 + 0x2 = c1
0x1 + 1x2 = c2
Sistema transformado
↓
x1 = c1, x2 = c2 Conjunto solución.
Resolver por eliminación de Gauss-Jordan el siguiente sistema de ecuaciones.

Solución.
La matriz aumentada del sistema es:

al sumar -2 veces el primer renglón a los renglones segundo y cuarto, se obtiene:

Al multiplicar el segundo renglón por -1 y luego sumar -5 veces el nuevo segundo renglón al tercer renglón y -4 veces el nuevo segundo renglón al cuarto renglón se obtiene:

al intercambiar los renglones tercero y cuarto y luego multiplicar por  el tercer renglón de la matriz resultante se obtiene la forma escalonada.
el tercer renglón de la matriz resultante se obtiene la forma escalonada.
el tercer renglón de la matriz resultante se obtiene la forma escalonada.
Al sumar -3 veces el tercer renglón al segundo renglón y luego sumar 2 veces el segundo renglón de la matriz resultante al primer renglón se obtiene la forma escalonada reducida.

EXPRESIÓN MATRICIAL DE UN SISTEMA DE ECUACIONES LINEALES.
Dado un sistema de ecuaciones

Se puede expresar de forma matricial de la siguiente manera:
 \cdot
\left(
\begin{array}{c}
x \\
y \\
z
\end{array}
\right ) =
\left(
\begin{array}{c}
b_1 \\
b_2 \\
b_3
\end{array}
\right )")
La expresión anterior, de forma abreviada  , se llama expresión matricial del sistema. Las matrices se conocen como:
, se llama expresión matricial del sistema. Las matrices se conocen como:

 matriz de los coeficientes
matriz de los coeficientes
 matriz de las incógnitas
matriz de las incógnitas
 matriz de los términos independientes
matriz de los términos independientes
OPERACIONES ELEMENTALES SOBRE RENGLONES.
Operaciones elementales de reglón. Dada una matriz A, de tamaño  , las siguientes tres operaciones se llaman operaciones elementales de renglón en la matriz A:
, las siguientes tres operaciones se llaman operaciones elementales de renglón en la matriz A:
, las siguientes tres operaciones se llaman operaciones elementales de renglón en la matriz A:- Multiplicar o dividir un renglón por un número diferente de cero.
- Sumar el múltiplo de un renglón a otro renglón.
- Intercambiar dos renglones.
El proceso de aplicar las operaciones elementales de renglón con el propósito de simplificar una matriz, se llama reducción por renglones.
En el proceso de aplicar operaciones elementales de renglón, se utilizará la siguiente notación:
 , significa sustituir el iésimo renglón por el iésimo renglón multiplicando por C.
, significa sustituir el iésimo renglón por el iésimo renglón multiplicando por C. , significa que se sustituye el j-ésimo renglón por la suma del j-ésimo renglón más el iésimo renglón multiplicado por C.
, significa que se sustituye el j-ésimo renglón por la suma del j-ésimo renglón más el iésimo renglón multiplicado por C. , significa que se intercambian los renglones i y j.
, significa que se intercambian los renglones i y j.
Ejemplo 8.
 .
.
La operación  da origen a la matriz
da origen a la matriz  .
.
da origen a la matriz .
La operación  dá origen, si se parte de la matriz A, a la matriz
dá origen, si se parte de la matriz A, a la matriz
dá origen, si se parte de la matriz A, a la matriz .
.
REDUCCION DE GAUSS Y GAUSS JORDAN.
El método de Gauss-Jordan continua haciendo operaciones de suma de filas haciendo que por encima de la diagonal principal también haya ceros con lo cual queda una matriz diagonal y las incógnitas se despejan sin mas que que hacer una división. Yo prefiero el método primero, es muy pesado ir escribiendo la matriz tantas veces y en esta página aun más.
x - 2y + z = 1
-2x + 5y - z = 2
-3x +4y + 2z = 3
1 -2 1 | 1 1 -2 1 | 1 0 1 1 | 4 0 1 1 | 4 0 -2 5 | 6 0 0 7 |14
Y aquí dejaríamos ya de operar con las matrices en la eliminación Gaussiana.
De la última ecuación tenemos
7z=14
z =2
con ello vamos a la fila segunda
y +2 = 4
y = 2
y ahora a la primera
x -4 +2 = 1
x = 3
Mientras que en Gauss-Jordan seguiríamos con la matriz, primero dividiríamos por 7 la última fila
1 -2 1 | 1 0 1 1 | 4 0 0 1 | 2
Ahora restaríamos la fila última a las dos de arriba
1 -2 0 |-1 0 1 0 | 2 0 0 1 | 2
Y ahora 2 veces la segunda la sumaríamos a la primera
1 0 0 | 3 0 1 0 | 2 0 0 1 | 2
Mes salíó muy sencillo el ejemplo, no hace falta dividir por nada ahora, ya tenemos directamente la respuesta en cada fila, en la primera x=3, en la segunda y=2 y en la tercera z=2
SISTEMAS HOMOGENEOS.
Los sistemas homogéneos tienen los términos independientes nulos. Siempre tienen solución, son compatibles. Ejemplos de uso de rangos para la discusión y resolución de sistemas homogéneos.

ALGEBRA DE MATRICES.
El concepto de matriz alcanza múltiples aplicaciones tanto en la representación y manipulación de datos como en el cálculo numérico y simbólico que se deriva de los modelos matemáticos utilizados para resolver problemas en diferentes disciplinas como, por ejemplo, las ciencias sociales, las ingenierías, economía, física, estadística y las diferentes ramas de las matemáticas entre las que destacamos las ecuaciones diferenciales, el cálculo numérico y, por supuesto, el álgebra. Para obtener información sobre la historia del álgebra de matrices recomendamos.
TIPOS DE MATRICES.
En matemáticas, se denomina matriz a un conjunto ordenado de números, ubicados en una estructura de filas y columnas. Estas cantidades pueden sumarse, multiplicarse y descomponerse de variadas maneras.
Existen distintos tipos de matrices:
MATRIZ FILA: está conformada por una única fila.
MATRIZ COLUMNA: esta clase de matriz se conforma por una sola columna.

MATRIZ RECTANGULAR: se caracteriza por presentar un número diferente de filas que de columnas. Su dimensión es m x n.
MATRIZ CUADRADA: presenta la misma cantidad de filas que de columnas. Los elementos que van desde la esquina superior izquierda hacia la esquina inferior derecha constituyen la diagonal principal.

MATRIZ NULA: recibe este nombre debido a que esta conformada por todos ceros como elementos.
MATRIZ TRIANGULAR SUPERIOR: en esta clase de matriz los elementos ubicados por debajo de la diagonal superior son ceros.
MATRIZ TRIANGULAR INFERIOR: aquí los elementos colocados por encima de la diagonal principal son ceros.
MATRIZ DIAGONAL: esta clase de matriz cuenta con la particularidad de que la totalidad de los elementos ubicados tanto por encima de la diagonal como por debajo de ella son nulos.

MATRIZ ESCALAR: es el nombre que recibe aquella matriz diagonal en la cual los elementos que conforman la diagonal principal son iguales.
MATRIZ IDENTIDAD: en ésta los elementos que componen la diagonal principal son iguales a 1.

MATRIZ TRASPUESTA: a partir de una matriz A, se denomina matriz traspuesta de A, a aquella matriz que se obtiene al cambiar de manera ordenada las filas por las columnas.

MATRIZ REGULAR: se denomina de esta manera a aquella matriz cuadrada que tiene inversa.
MATRIZ SINGULAR: es un tipo de matriz que no posee inversa.
OPERACIONES CON MATRICES.
Suma y resta de matrices
Para poder sumar o restar matrices, éstas deben tener el mismo número de filas y de columnas. Es decir, si una matriz es de orden 3 x 2 y otra de 3 x 3, no se pueden sumar ni restar. Esto es así ya que, tanto para la suma como para la resta, se suman o se restan los términos que ocupan el mismo lugar en las matrices.
Ejemplo:
Sean las matrices: A =
|
3
|
1
|
2
| ||
0
|
5
|
-3
| |||
7
|
0
|
4
|
y
B =
|
-1
|
2
|
4
| ||
2
|
5
|
8
| |||
0
|
1
|
-2
|
Entonces:
A + B =
|
3
|
1
|
2
|
+
|
-1
|
2
|
4
|
=
|
2
|
3
|
6
| ||||||
0
|
5
|
-3
|
2
|
5
|
8
|
2
|
10
|
2
| |||||||||
7
|
0
|
4
|
0
|
1
|
-2
|
7
|
1
|
2
|
A.B =
|
3
|
1
|
2
|
.
|
-1
|
2
|
4
|
=
|
4
|
-1
|
-2
| ||||||
0
|
5
|
-3
|
2
|
5
|
8
|
-2
|
0
|
5
| |||||||||
7
|
0
|
4
|
0
|
1
|
-2
|
7
|
-1
|
6
|
Para sumar o restar más de dos matrices se procede igual. No necesariamente para poder sumar o restar matrices, éstas tienen que ser cuadradas.
Ejemplo:
Sean
A =
|
-1
|
2
|
4
|
, B =
|
3
|
2
|
0
|
.
|
y C =
|
5
|
-1
|
3
| |||||
2
|
7
|
6
|
0
|
-3
|
-1
|
1
|
1
|
2
|
A + B + C =
|
-1
|
2
|
4
|
+
|
3
|
2
|
0
|
.
|
+
|
5
|
-1
|
3
|
=
|
7
|
3
|
7
| |||||||
2
|
7
|
6
|
0
|
-3
|
-1
|
1
|
1
|
2
|
3
|
5
|
7
|
A - B + C =
|
-1
|
2
|
4
|
-
|
3
|
2
|
0
|
.
|
+
|
5
|
-1
|
3
|
=
|
1
|
-1
|
7
| |||||||
2
|
7
|
6
|
0
|
-3
|
-1
|
1
|
1
|
2
|
3
|
11
|
9
|
Producto de matrices
Para poder multiplicar dos matrices, la primera debe tener el mismo número de columnas que filas la segunda. La matriz resultante del producto quedará con el mismo número de filas de la primera y con el mismo número de columnas de la segunda. Es decir, si tenemos una matriz 2 x 3 y la multiplicamos por otra de orden 3 x 5, la matriz resultante será de orden 2 x 5.
(2 x 3) x (3 x 5) = (2 x 5)
Se puede observar que el producto de matrices no cumple la propiedad conmutativa, ya que en el ejemplo anterior, si multiplicamos la segunda por la primera, no podríamos efectuar la operación.
3 x 5 por 2 x 3,
puesto que la primera matriz no tiene el mismo número de columnas que filas la segunda. Supongamos que A = (a×) y B = (b×) son matrices tales que el número de columnas de A coincide con el número de filas de B; es decir, A es una matriz m x p y B una matriz p x n. Entonces el producto AB es la matriz m x n cuya entrada ij se obtiene multiplicando la fila i de A por la columna j de B. Esto es,
a11
|
...
|
a1p
|
.
|
b11
|
...
|
b1j
|
...
|
b1n
|
=
|
c11
|
...
|
c1n
| ||||||
.
|
...
|
.
|
.
|
...
|
...
|
.
|
.
|
...
|
.
| |||||||||
ai1
|
...
|
a ip
|
.
|
...
|
...
|
.
|
.
|
c ij
|
.
| |||||||||
.
|
...
|
.
|
.
|
...
|
...
|
.
|
.
|
...
|
.
| |||||||||
a m1
|
...
|
a mp
|
b p1
|
...
|
b pj
|
...
|
b pm
|
c m1
|
...
|
c mn
|
donde c ij = ai1 b1j + ai2 b2j + ...+ a ip b pj
Ejemplo:
1.
2.
- Producto por un escalar
El producto de un escalar k por la matriz A, escrito k·A o simplemente kA, es la matriz obtenida multiplicando cada entrada de A por k:
k.A =
|
k.a11
|
k.a12
|
...
|
k.a1n
| ||
...
|
...
|
...
|
...
| |||
k.am1
|
k.am2
|
...
|
k.a mn
|
Ejemplo:
Sea A =
|
1
|
-2
|
3
| ||
4
|
5
|
-2
|
Entonces:
3.A =
|
3.1
|
3.(-2)
|
3.3
|
=
|
3
|
-6
|
9
| ||||
3.4
|
3.5
|
3.(-2)
|
12
|
15
|
-6
|
División de matrices
La división de matrices se define como el producto del numerador multiplicado por la matriz inversa del denominador. Es decir, sean las matrices A y B tal que A/B = AB-1:
Si una matriz está dividida entre un escalar, todos los términos de la matriz quedarán divididos por ese escalar.
Ejemplo:
Sean la matriz A =
|
8
|
16
|
, y k = 2 un escalar. En este caso:
| ||
3
|
-6
|

PROPIEDADES DE LAS OPERACIONES CON MATRICES.
Dos matrices A y B se dicen multiplicables si el número de columnas de A coincide con el número de filas de B. M(m*n) * M(n*p) = M(m*p); Y ademas m*p nos dirá el tamaño de la matriz resultante. El elemento cij de la matriz producto se obtiene multiplicando cada elemento de la fila i de la matriz A por cada elemento de la columna j de la matriz B y sumándolos.
Ejemplo: A•B =  •
• 
•  es igual a
es igual a [C(3*3)]; matriz resultante de 3*3
[C(3*3)]; matriz resultante de 3*3Propiedades del producto de matrices[editar]
Asociativa[editar]
A • (B • C) = (A • B) • C
Elemento neutro[editar]
A • I = A Donde I es la matriz identidad del mismo orden que la matriz A. Anticonmutativa A • B ≠ B • A
Distributiva del producto respecto de la suma[editar]
A · (B + C) = A · B + A · C
MATRIZ INVERSA.
Dada una matriz A, ¿Podremos encontrar otra matriz B tal que A·B=B·A=I?
Esta matriz B existe aunque no siempre, de existir se le llama matriz inversa de A y se nota A-1. Para que exista la inversa de A, ésta tiene que ser cuadrada pues de lo contrario no se podría hacer el producto por la izquierda y por la derecha, luego cuando hablamos de matrices invertibles estamos hablando de matrices cuadradas.
Esta matriz B existe aunque no siempre, de existir se le llama matriz inversa de A y se nota A-1. Para que exista la inversa de A, ésta tiene que ser cuadrada pues de lo contrario no se podría hacer el producto por la izquierda y por la derecha, luego cuando hablamos de matrices invertibles estamos hablando de matrices cuadradas.
Condición necesaria y suficiente para que una matriz sea invertible es que no sea singular, es decir, que su determinante sea no nulo |A| ≠ 0
Cálculo de la matriz inversa
1. Método de Gauss-Jordan
Este método consiste en colocar junto a la matriz de partida (A) la matriz identidad (I) y hacer operaciones por filas, afectando esas operaciones tanto a A como a I, con el objeto de transformar la matriz A en la matriz identidad, la matriz resultante de las operaciones sobre I es la inversa de A (A-1).
Las operaciones que podemos hacer sobre las filas son:
a) Sustituir una fila por ella multiplicada por una constante, por ejemplo, sustituimos la fila 2 por ella multiplicada por 3.
b) Permutar dos filas
c) Sustituir una fila por una combinación lineal de ella y otras.

La matriz inversa de A es

2. A través de la matriz de adjuntos
Dada una matriz A, determinamos la matriz de adjuntos de su traspuesta. Si multiplicamos esa matriz por 1/|A| se obtiene la matriz inversa de A.
DETERMINANTES.
El determinante es una herramienta matemática, se puede encontrar o extraer un determinante únicamente de las matrices que son cuadradas (tienen igual número de filas y columnas), y es un numero real (en caso de que la matriz sea real) consistente en la suma de los productos elementales de la matriz.
El orden de un determinante viene dado por el número de filas y columnas que tenga. Existen diferentes métodos para resolverlos, que veremos a continuación.

Nota: Es necesario indicar que usaremos los símbolos Det(A) o │A│ para referirnos al determinante de A.
El determinante de una matriz puede ser positivo, negativo o cero.
PROPIEDADES DE LOS DETERMINANTES.
Las propiedades de los determinantes, que enunciaremos a continuación, son válidas cualquiera que sea su orden. No obstante, para facilitar su comprensión, utilizaremos determinantes de orden 2 y 3. Las comprobaciones de las mismas se pueden hacer fácilmente desarrollando los determinantes.
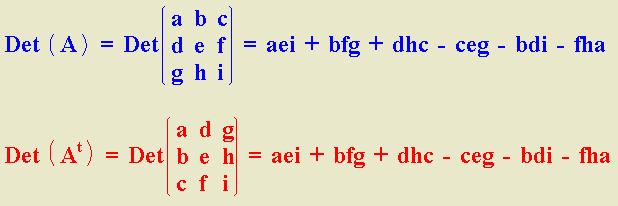
1ª El determinante de una matriz cuadrada coincide con el determinante de su traspuesta, es decir: Det ( A ) = Det ( At )
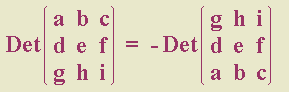
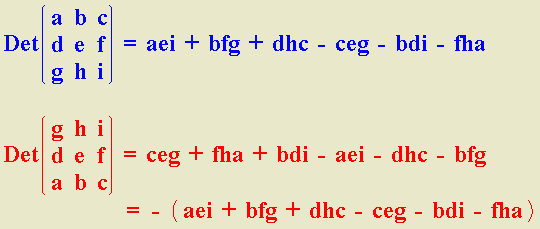
2ª Si intercambiamos dos filas o dos columnas de una matriz cuadrada, su determinante cambia de signo aunque son iguales en valor absoluto.
3ª Si multiplicamos todos los elementos de una fila o columna de una matriz cuadrada por un número k, su determinante queda multiplicado por dicho número.
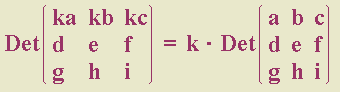
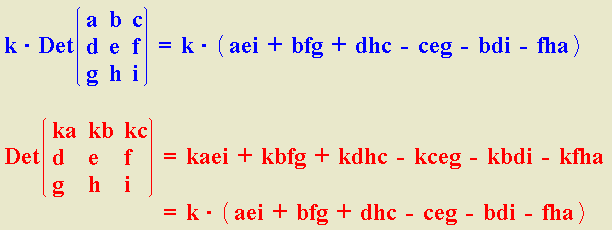
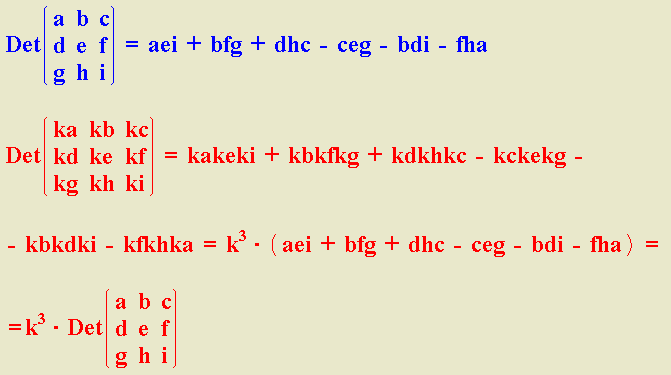
Como generalización de esta propiedad, si multiplicamos todos los elementos de una matriz cuadrada de orden n por un número k, su determinante queda multiplicado por kn, es decir: Det (k . A) = kn . Det ( A ).
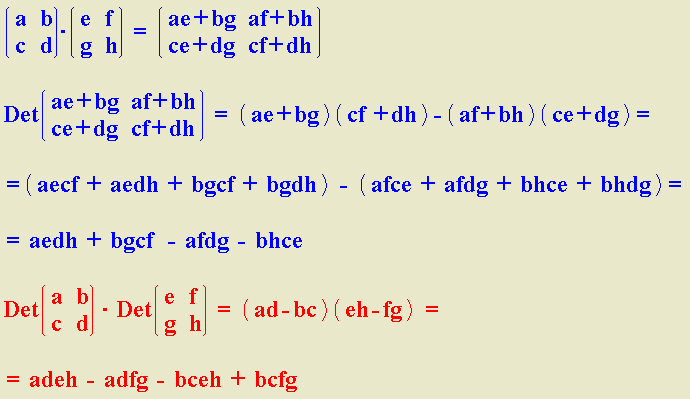
4ª El determinante del producto de dos matrices cuadradas del mismo orden es igual al producto de los determinantes de dichas matrices: Det ( A . B ) = Det ( A ) . Det ( B ).

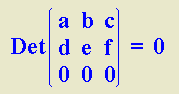
5ª Si una matriz cuadrada tiene todos los elementos de una fila o columna nulos, su determinante es cero.
REGLA DEL CRAMER.
Los pasos a seguir para calcular los sistemas de ecuaciones según la regla de Cramer son los siguientes:
1. Hallar la matriz ampliada (A  b) asociada al sistema de ecuaciones, esto es: que la primera columna esté formada por las entradas de los coeficientes de la primera incógnita de las ecuaciones; que la segunda columna la formen las de la segunda incógnita, y así hasta llegar a la última columna, que estará constituida por las entradas de los términos independientes de las ecuaciones.
b) asociada al sistema de ecuaciones, esto es: que la primera columna esté formada por las entradas de los coeficientes de la primera incógnita de las ecuaciones; que la segunda columna la formen las de la segunda incógnita, y así hasta llegar a la última columna, que estará constituida por las entradas de los términos independientes de las ecuaciones.
2. Calcular el determinante de A.
3. Aplicar la regla de Cramer, que consiste en:
a) ir sustituyendo la primera columna del det (A) por los términos independientes;
b) dividir el resultado de este determinante entre el det (A) para hallar el valor de la primera incógnita;
c) continuar sustituyendo los términos independientes en las distintas columnas para hallar el resto de las incógnitas.
Ejemplo:
Sea el sistema de ecuaciones lineales formado por dos ecuaciones con dos incógnitas:
Encontrar el valor de x e y mediante la regla de Cramer.
Empezaremos con el primer paso, que consiste en hallar la matriz ampliada A b asociada al sistema de ecuaciones lineales:

El segundo paso es calcular el determinante de A. Así pues:
Y el tercero y último paso consiste en calcular las incógnitas:

CONCLUSIÓN.
En este tema se ha presentado como resolver sistemas de
ecuaciones lineales por métodos numéricos, problema muy
común y complejo dado que bien suele hacer falta en
muchas disciplinas o bien hace falta su resolución dentro de
otro método numérico.
BIBLIOGRAFIA.
http://www.hiru.com/matematicas/sistemas-de-
ecuaciones-lineales-y-matrices
http://www.ugr.es/~ahurtado/PDF/Tema1.pdf
http://mitecnologico.com/igestion/Main/ClasificacionDeL
osSistemasDeEcuacionesLineales
http://www.profesorenlinea.com.mx/matematica/Ecuacio
nes_sistemas.html
http://matematica.laguia2000.com/general/ecuaciones-
equivalentes
http://licmat.izt.uam.mx/notas_de_clase/elimgaussjord.p
df
http://docencia.udea.edu.co/cen/AlgebraTrigonometria/A
rchivos/capi11/capi11_6.html
http://matematicasies.com/Expresion-matricial-de-un-
sistema
http://docencia.udea.edu.co/cen/AlgebraTrigonometria/A
rchivos/capi11/capi11_3.html
http://www.todoexpertos.com/categorias/ciencias-e-
ingenieria/matematicas/respuestas/drkh391wwaa5a/difer
encia-entre-eliminacion-gaussiana-y-gauss-jordan
http://www.fisicanet.com.ar/matematica/sistemas_ecuaci
ones/ap05_operaciones_con_matrices.php
http://es.wikibooks.org/wiki/Apuntes_matem%C3%A1tic
os/Primero_Administraci%C3%B3n/Conjuntos_Num%C3
%A9ricos#Propiedades_de_la_suma_de_matrices
http://www.ematematicas.net/matrices.php?tipo=6
http://www.monografias.com/trabajos101/determinates-
algebra-lineal/determinates-algebra-lineal.shtml
http://recursostic.educacion.es/descartes/web/materiales_
didacticos/determinantes_api/propiedades_de_los_deter
minantes.htm
http://www.sectormatematica.cl/contenidos/cramer.htm
sistema
http://docencia.udea.edu.co/cen/AlgebraTrigonometria/A
rchivos/capi11/capi11_3.html
http://www.todoexpertos.com/categorias/ciencias-e-
ingenieria/matematicas/respuestas/drkh391wwaa5a/difer
encia-entre-eliminacion-gaussiana-y-gauss-jordan
http://www.fisicanet.com.ar/matematica/sistemas_ecuaci
ones/ap05_operaciones_con_matrices.php
http://es.wikibooks.org/wiki/Apuntes_matem%C3%A1tic
os/Primero_Administraci%C3%B3n/Conjuntos_Num%C3
%A9ricos#Propiedades_de_la_suma_de_matrices
http://www.ematematicas.net/matrices.php?tipo=6
http://www.monografias.com/trabajos101/determinates-
algebra-lineal/determinates-algebra-lineal.shtml
http://recursostic.educacion.es/descartes/web/materiales_
didacticos/determinantes_api/propiedades_de_los_deter
minantes.htm
http://www.sectormatematica.cl/contenidos/cramer.htm